Oggi comanderemo un servo-motore. Attraverso un potenziometro genereremo una tensione,
che verrà letta da un ingresso analogico dell'Arduino, il quale a sua volta
posizionerà il servo ad un angolo proporzionale al valore letto in input.
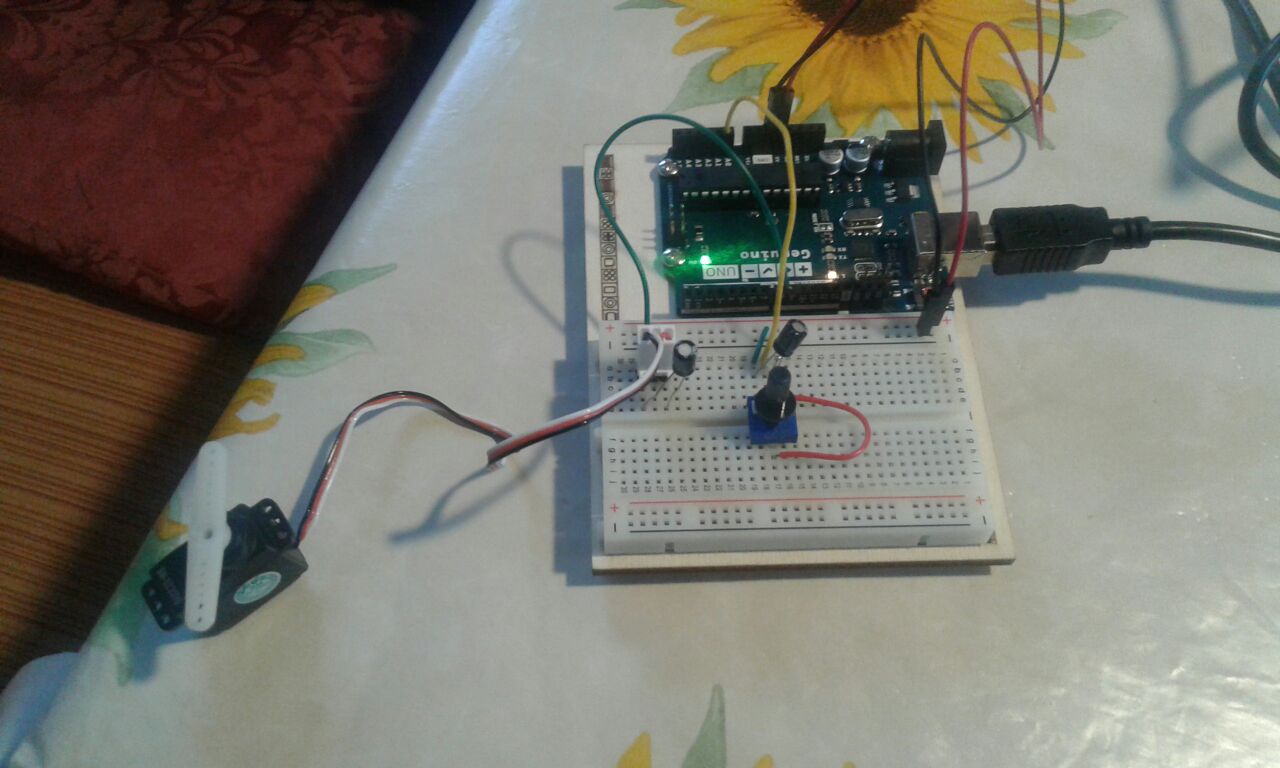
Ogni volta che ruotiamo il potenziometro vediamo che il servo si muove fino a
raggiungere lo stesso angolo.